Katalogizace rastrových map
Jedním z hlavních
podkladů pro přípravu
modelu jsou naskenované mapy. Může jít o polohopisné a regulační plány,
speciální situace (železnice, tramvaje), stavební plány (zejména půdorysy)
nebo i jen o načrtnuté plánky. Kterákoliv z map může obsahovat velmi
zajímavé informace, byť i třeba ne v úplně přesně zaměřené pozici.
Mapy jsou dlouhodobě dohledávány v nejrůznějších archivech a za skoro dvacet let
návštěv badatelen se podařilo nashromáždit desítky tisíc skenů celých map nebo
jejich dílčích částí.
Pro další práci na modelu Prahy je nutné mít možnost vyhledat v tomto obrovském
množství pokud možno snadno a přitom přesně ty, které se týkají nějakého zvoleného místa.
Zpracování map
Podstatou zpracování je co nejpřesnější
napasování rastrové mapy na
zeměpisné souřadnice. Tento krok se označuje jako
georeferencování map.
Hlavním přínosem georeferencování je následné snadné a rychlé vyhledání všech
map, které se týkají nějakého místa. Pro libovolné místo tak rychle a přesně
vyhledáme opravdu všechny relevantní mapy pouhým označením oblasti na
referenční mapě Prahy.
I když některá z map zachycuje dané místo jen okrajově a třeba jen jeho malou
část, může na ní být zachycen detail, který na jiných mapách přímo zaměřených
na danou lokalitu vůbec není. Ten by tak mohl uniknout pozornosti, kdybychom
mapy dohledávali pouze podle jejich textových popisů.
Mapy mohou být z nejrůznějších zdrojů a zaměřené v různých letech, a tak
můžeme porovnávat změny, ke kterým tam v průběhu času došlo. Dalším
přínosem georeferencování je totiž sjednocení měřítka i orientace všech map, takže
se různé mapy navzájem daleko lépe porovnávají – jak je vidět i na funkci automatického výřezu.
Proto je už od roku 2007 vlastními silami vyvíjena aplikace RamaGeo,
která je uzpůsobena přesně potřebám práce na modelu a je možné ji průběžně rozšiřovat o nové
funkce.
Poznámka k roku 2020: V době psaní původní verze tohoto textu
(před rokem 2010) byly mapy v archivních fondech katalogizovány pomocí
textových popisů obsahujících přibližné určení místa zachyceného na mapě,
resp. výčet nejdůležitějších objektů, v lepším případě doplněný o seznam
čísel popisných. V takovém katalogu se obtížné hledá, protože při jeho
vytváření není snadné dodržet jednotnou metodiku a terminologii popisu, a je
tak velké riziko, že dojde k přehlédnutí relevantního materiálu.
V současné době se už začínají objevovat možnosti
vyhledávání map v online katalozích pomocí grafického určení území, které
je na mapě zachyceno. V případě existujícího kladu listů je to poměrně
snadné, v ostatních případech bývá často použito pouze přibližné ruční
ohraničení území. Dnes už je také běžnou funkcí GISů (geografických
informačních systémů) vykreslení rastrové mapy jako jedné z mapových vrstev,
co nejpřesněji zarovnané s ostatními geodetickými vrstvami. Obvykle se však
počítá s maximálně desítkami takto vložených rastrových map, ne s desítkami tisíc.
Omezené jsou také možnosti vyhledávání podle zájmové oblasti.
Georeferencování mapy
Georeferencováním mapy se rozumí takové natočení mapy (a případně změna její
velikosti), které povedou k co nejpřesnějšímu zarovnání mapové kresby s čarami
na referenční vektoré mapě. Postupujeme tak, že hledáme totožné body na
georeferencované a referenční mapě, jak je vidět na obrázku:
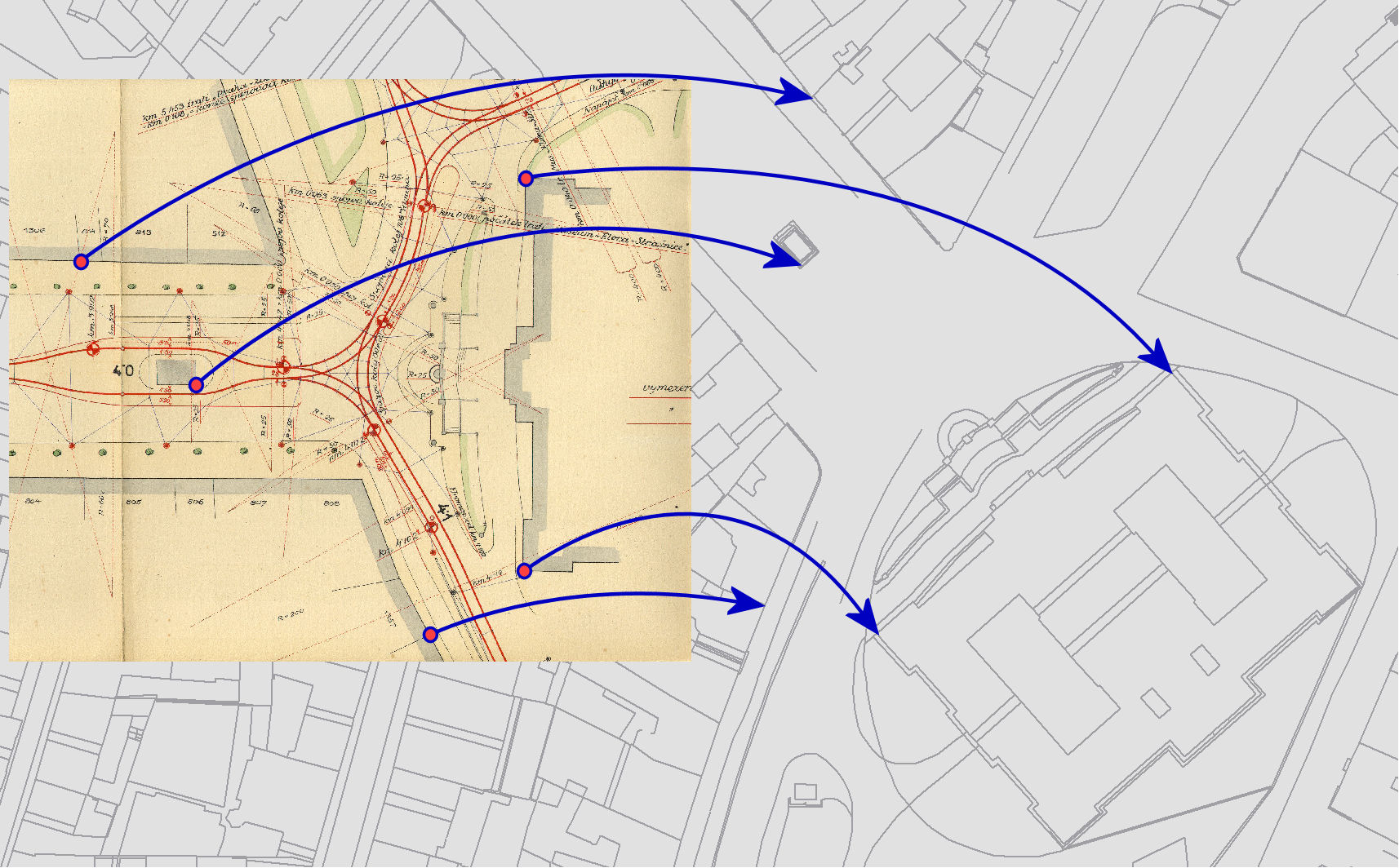
Jako společné body byly identifikovány rohy budovy Národního muzea, jeden
roh pomníku sv. Václava a hranice parcely mezi domy čp. 813 a 1306 a
mezi domy čp. 1367 a 577. Po spuštění výpočtu nalezla aplikace RamaGeo vhodné parametry transformace situačního
plánu a jeho napasování, jak je vidět na následujícím obrázku:

Vidíme, že hranice stavebních parcel domů i budovy Národního muzea jsou nyní
v téměř přesném zákrytu. Georeferencováním rastrové mapy jsme však získali další
detailní informace – o šířce chodníků, o trasování tramvajových kolejí, o
pozicích sloupů trolejového vedení, případně i o plochách zeleně a vysázených
stromech. Detaily jsou zaznamenány při vektorizaci mapy.
Množství dohledávaných identických bodů nutných pro kvalitní napasování
rastrové mapy se liší podle kvality původního zaměření, ale i kvality
naskenování. Protože je použita uniformní
transformace, tak teoreticky stačí zadat body pouze tři (nesmí však být
na jedné přímce). Obvykle je však lepší dohledat bodů více – už jen kvůli
kontrole kvality zakreslení mapové kresby v celé ploše naskenované rastrové
mapy.
Referenční mapa
Referenční mapa použitá při georeferencování musí být co nejpřesnější. Proto je vhodné
použít moderní letecky a laserem zaměřené vektorové mapy. Problém je však v tom, že georeferencované
rastrové mapy jsou z principu starší. A čím starší jsou, tím obvykle doznalo dané místo
oproti dnešnímu stavu více změn, a tím hůře se hledají totožné body na rastrové
a referenční mapě.
Jako prvotní referenční vektorová mapa tak byla použita Jednotná digitální mapa Prahy (JDMP) ke stavu k roku 2002. Tato
vektorová mapa je od 60. let 20. století vytvářena na IPR Praha (původně IMIP, potom ÚRM). Dnes je
označována jako
Digitální technická mapa Prahy (DTMP).
Pro některá místa bylo možné použít přímo stav k roku 2002 a dohledat dostatek
identických bodů. Pro celou řadu starších map se však nepodařilo nalézt ani jediný
totožný bod. Proto je nutné postupně vytvářet
vlastní referenční mapu umožňující dohledat potřebné body i pro lokality,
kde došlo k výrazným stavebním změnám.
Použitá transformace rastrové mapy se skládá ze změny měřítka (nezávisle
podle osy x a y), otočení a posunu. Transformace je uniformní pro všechny body
rastrové mapy. Pro každou nadefinovanou dvojici bodů je počítána penalizace
jako vzdálenost mezi transformovaným bodem z rastrové mapy a bodem z vektorové
mapy. V rámci optimalizační úlohy je minimalizováno kritérium dané součtem
penalizace za všechny dvojice bodů. Penalizacím za různé dvojice bodů mohou
být přiřazeny různé váhy a vyjádřit tak rozdílnou důležitou dvojic. Pro
nalezení optimální hodnoty byl použit evoluční algoritmus, který umožňujete
nadefinovat optimalizační funkci s libovolným počtem dvojic bodů. Pro
zrychlení výpočtu se nedopočítává přímo vzdálenost mezi dvěma body a ušetří se
výpočet odmocniny. Jde tak vlastně o metodu nejmenších čtverců.
Existují typy transformcí, které by umožnily i lokální deformace. Protože však
u historických map bývá problém identifikovat dostatek totožných bodů na obou
mapách, tak byla implementována jednodušší verze transformace uniformní.
Lokální deformace lze i nyní realizovat vyříznutím malé části původní mapy
a jejím samostatným napasováním (když je dostatek použitelných bodů).
Filtrování a vyhledávání map
Po té, co byly mapy georeferencovány, lze už automaticky vyhledávat pouhým
označením zájmové oblasti na referenční mapě Prahy. Pokud některá z map
zachycuje alespoň malou část označené oblasti, bude do výběru zahrnuta.
Spolu s mapami se však ukládají i další údaje, z nichž asi nejdůležitější je
časové určení jejího vzniku – buď přesně rok, nebo přibližné časové určení
pomocí „před rokem X“, „po roce X“. Dále to je například zdroj,
ze kterého mapa pochází; její autor; obor (např. MHD, železnice, vojsko, sport...);
subjekt (např. Pražská obecní plynárna, Elektrické podniky, armáda, Křižík...),
kterého se mapa týká; měřítko; jde-li o návrh, či záznam dle
provedení; nebo i přesnost, se kterou se mapu podařilo georeferencovat. Mapy
lze tak kromě zájmové oblasti filtrovat i podle těchto kritérií.
Na následujícím obrázku jsou vyhledány všechny mapy, které se týkají okolí budovy
Národního muzea. Zájmová oblast je označena žlutým kroužkem a její střed křížkem.
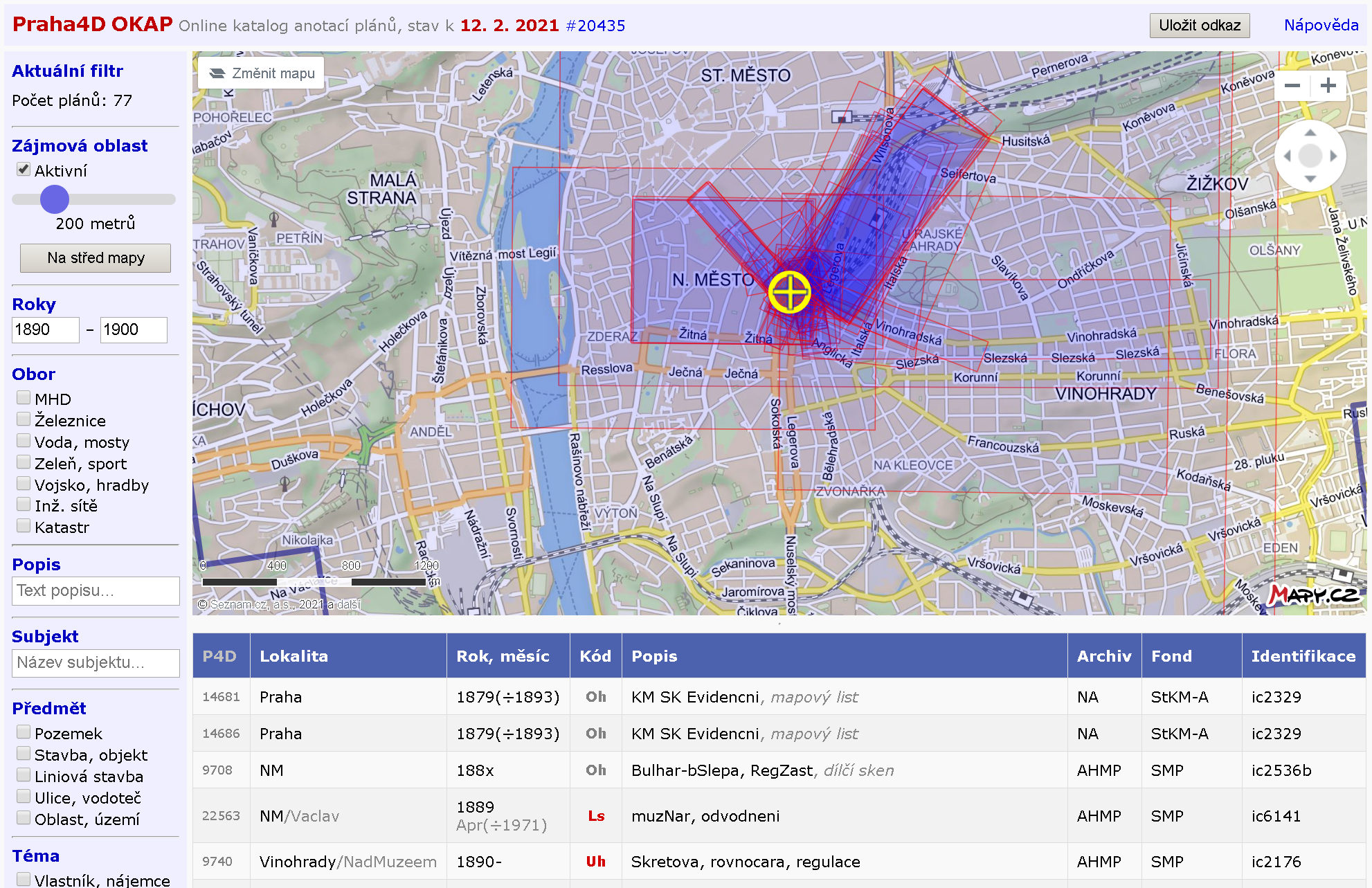
Každý červeně ohraničený obdélník s modrým pozadím reprezentuje jednu georeferencovanou mapu.
Pokud obdélník zasahuje byť jen malou částí do zájmové oblasti, je zahrnut do aktuálního výběru.
Množství dohledaných map lze měnit změnou velikosti zájmové oblastí, případně
zužovat pomocí dalších kritérií. Běžné je omezení pouze na určité období, ale
omezit můžeme například obor pouze na situační plány týkající se MHD (koňka,
tramvaje, trolejbusy).
Automatický výřez map
Po georeferencování každé z map lze nechat vytvořit výřezy zobrazující ve stejné velikosti a ve
stejné orientaci danou lokalitu.
Vektorizace map
Mapy, které se už podařilo úspěšne georeferencovat, jsou vektorizovány a
přidány jako rozšíření
referenční mapy. Tím je v ideálním případě nově možné georeferencovat některou mapu, pro
kterou před tím nebylo možné nalézt dostatek totožných bodů. Po jejím úspěšném
georeferencování je i ta vektorizována.
Postupně tak vzniká Syntetická
vektorová mapa Prahy pokrývající období od roku 1800 do roku 2000
s kroky po deseti letech. Cílem je mít pro každé desetiletí k dispozici
referenční vektorovou mapu reprezentující tehdy platný stav, aby se snadno
dohledávaly totožné body při
georeferencování.
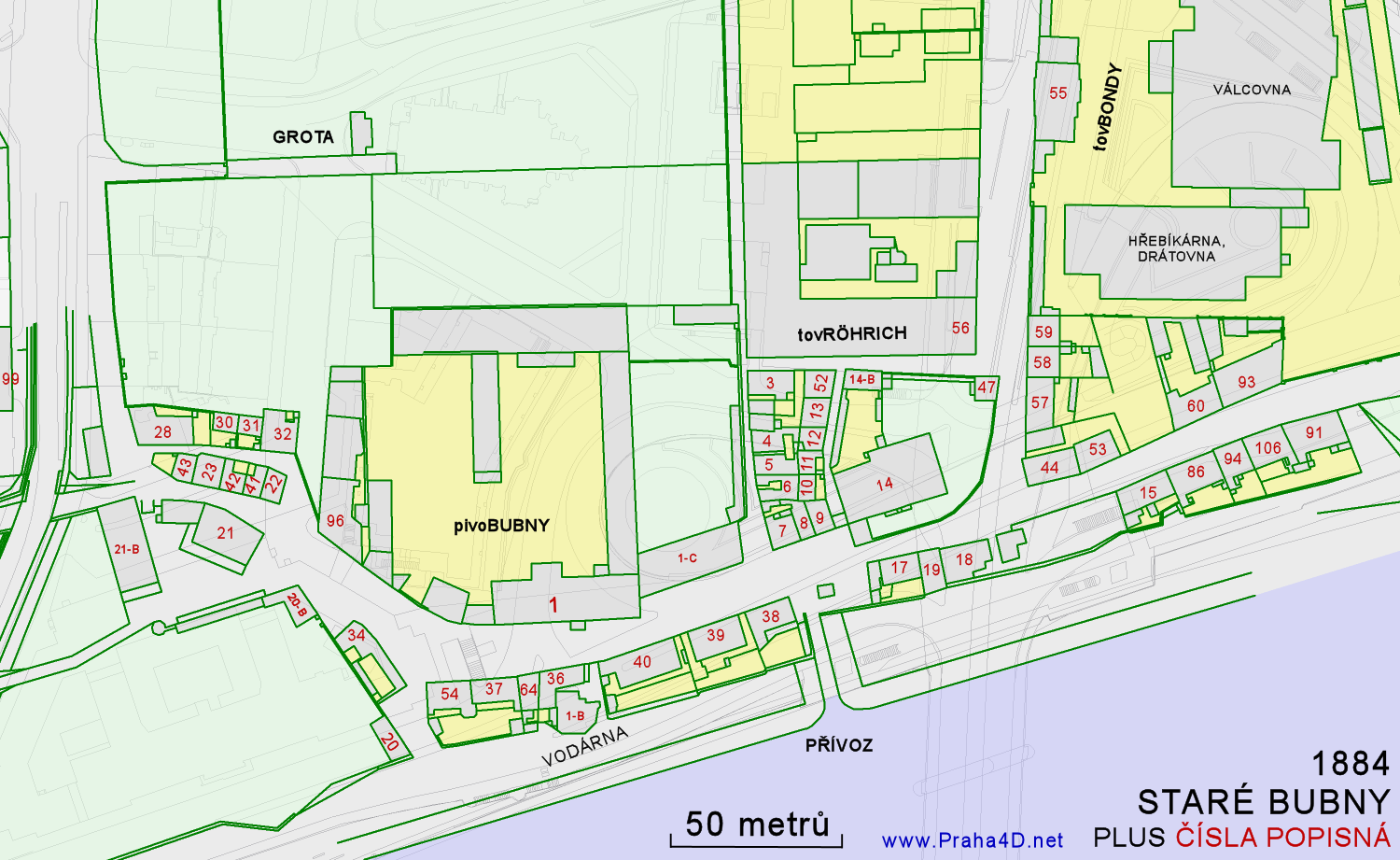
Na obrázku vidíme ukázku syntetické vektorové mapy pro okolí dnešní stanice metra Vltavská ve stavu k roku 1884.
Syntetická mapa je rozšiřována a zpřesňována i podle průběžně vytvářených
pracovních 3D modelů.
Aplikace RamaGeo a OKAP
Ukázky v odstavci
Georeferencování map
a
Automatický výřez jsou z interní aplikace
RamaGeo (
Georeferencování rastrových map). V té byla
naprogramována veškerá potřebná funkcionalita pro georeferencování i
vektorizaci rastrových map. Přes vysokou pracnost vlastního řešení je hlavní
výhodou možnost si aplikaci uzpůsobit přesně podle potřeb.
Vyhledávání a filtrování map bylo v omezené funkcionalitě zpřístupněno
online v podobě webové aplikace OKAP. Snadno si lze tak nechat vyhledat například výše zmíněné plány v okolí budovy Národního muzea a vytvořené v letech 1890 až 1900. Případně pouze ty, které se týkají pouze koňky a tramvají v období od roku 1875 do roku 1950.
Součástí aplikace je i podrobná
nápověda s ukázkami možnostmi jejího použití.
Vytvořeno: 15. května 2007. Poslední aktualizace: 23. září 2022
Starší verze stránky.